
Posicionamento com precisão centimétrica em RTK e PPK.
Para mapeamento preciso de UAV com menos GCPs
REACH M+
Frequênia simples
Linha de base até 20 km em PPK
REACH M2
Multi-frequências
Linha de base até 100 km em PPK

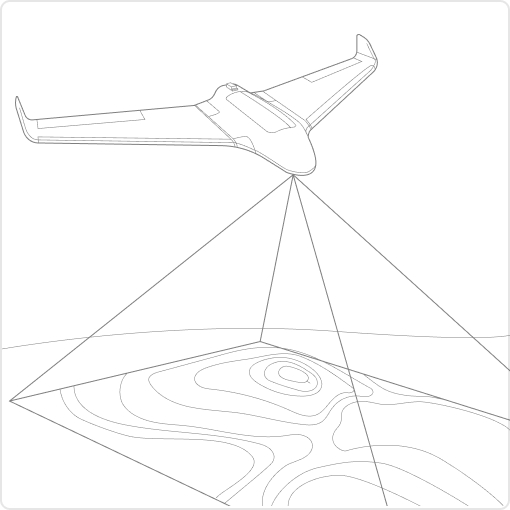
Normalmente, o piloto automático aciona a câmera e grava a coordenada que ela possui no momento. Quando o drone está voando a 20 m/s o GPS funciona a 5 Hz, isso significa que o piloto automático terá leituras de posição apenas a cada 4 m, o que não é adequado para georreferenciamento preciso. Além disso, sempre há um atraso entre o gatilho e o momento real em que a foto é tirada.
O Reach resolve o problema de posicionamento conectando diretamente à porta da câmera por uma sapata, sincronizada com o obturador. O tempo e as coordenadas de cada foto são registrados com uma resolução menor que um microssegundo. Este método permite usar GCPs apenas para verificar sua precisão.
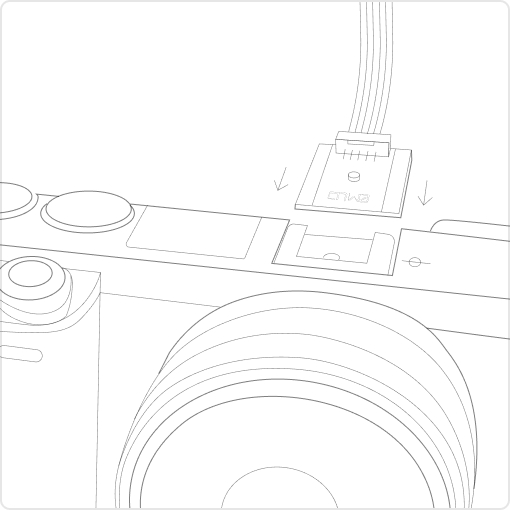
Sempre que uma foto é tirada, a câmera produz um pulso no conector de sapata, sincronizado com a abertura do obturador.
O Reach captura os pulsos de sincronização do flash com uma resolução de microssegundos e os armazena em um registro no formato RINEX na memória interna.
Após o vôo, obtenha os registros RINEX do módulo Reach e da estação base (Reach RS, CORS ou outro receptor).
Processe arquivos RINEX usando o software RTKLIB gratuito. O arquivo produzido com coordenadas precisas das fotos pode ser usado para georreferenciamento.

Para calcular coordenadas precisão centimétrica em PPK e RTK, o Reach precisa de correções de uma estação base. Pode ser outro receptor Reach ou serviço NTRIP. O VRS também é suportado.
Se você trabalha em linhas de base curtas, o Reach M+ é a melhor opção.
*coming with a software update,
up to 10 Hz now
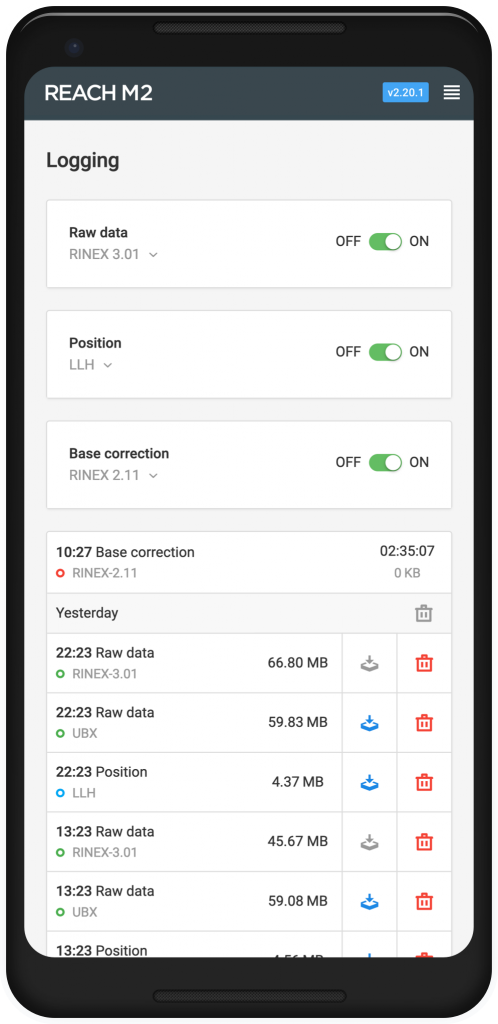
O ReachView é o software mais fácil de usar para a coleta de dados disponível para Android e iOS. Com o ReachView, você pode controlar todos os recursos dos receptores Reach, como configurar uma base, registrar dados RINEX, configurar saída NMEA e monitorar dados.
O Reach é capaz de acionar câmeras e registrar eventos. O recurso de marcar eventos é essencial para o mapeamento aéreo, pois permite registrar o tempo preciso quando o obturador foi ativado.
Os logs são gravados automaticamente na memória interna, salvos diretamente no formato RINEX. Veja uma lista dos logs e faça o download deles usando o aplicativo ReachView.
O ReachView mostra a qualidade dos satélites, sua localização em um mapa e muito mais.
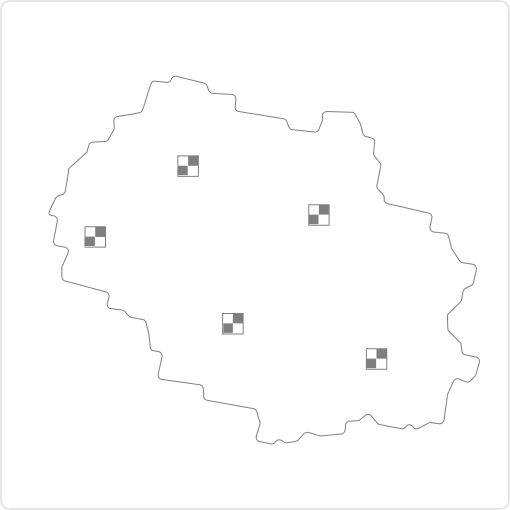
Com uma breve sinopse dos resultados, o desvio máximo de pontos não ultrapassou 0,09m em todos os eixos. Esse é um resultado incrível, pois o tamanho médio do pixel das imagens resultantes foi de 0,045 m. O erro médio em todos os eixos foi de apenas alguns mm!
Brian Christal, Tuffwing
A Tuffwing realizou recentemente a integração do Emlid Reach RTK para permitir a criação de mapas de precisão sem o uso de GCPs. O sistema foi comparado, comparando o modelo georreferenciado direto com um conjunto de GCPs, usados apenas para fins de detecção de erros. O erro RMS lateral alcançado foi de apenas 4 cm, de acordo com o relatório de qualidade Pix4D.
Jeff Taylor, Event38
Neste estudo de caso, produzimos um ortomosaico com o Drone Data Management System ™ com RMSE horizontal de 2,45 cm e vertical de 5,08 cm, em comparação com um levantamento com GPS no nível do solo.
14 mm + 1 ppm
RINEX com eventos
com taxa de atualização de até 20 Hz*
*coming with a software update,
up to 10 Hz now
© 2023 JMS Agrimensura